



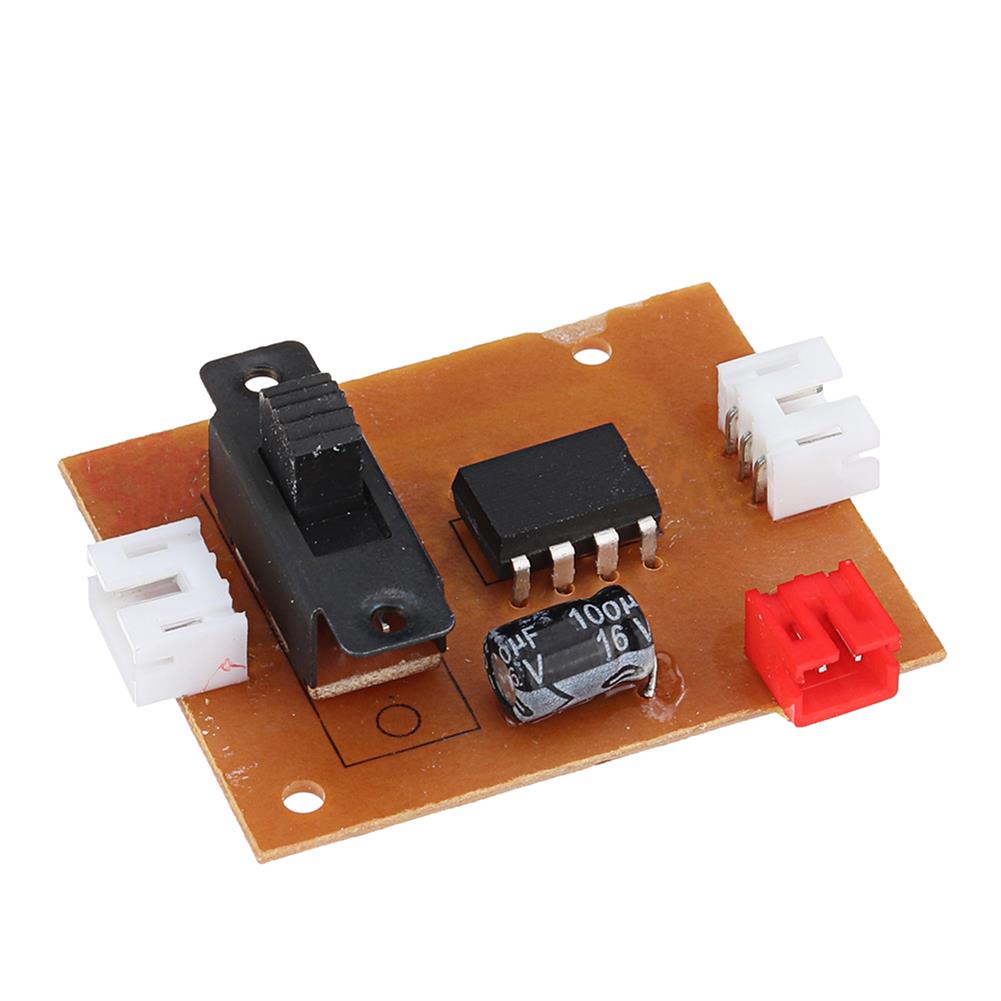
 E3JK-R4M2 Retro-Reflective Dark-ON Pre-Wired Type Photoelectric Sensor Switch with E39-R1 Reflector DC 12-24V
$17.48
E3JK-R4M2 Retro-Reflective Dark-ON Pre-Wired Type Photoelectric Sensor Switch with E39-R1 Reflector DC 12-24V
$17.48
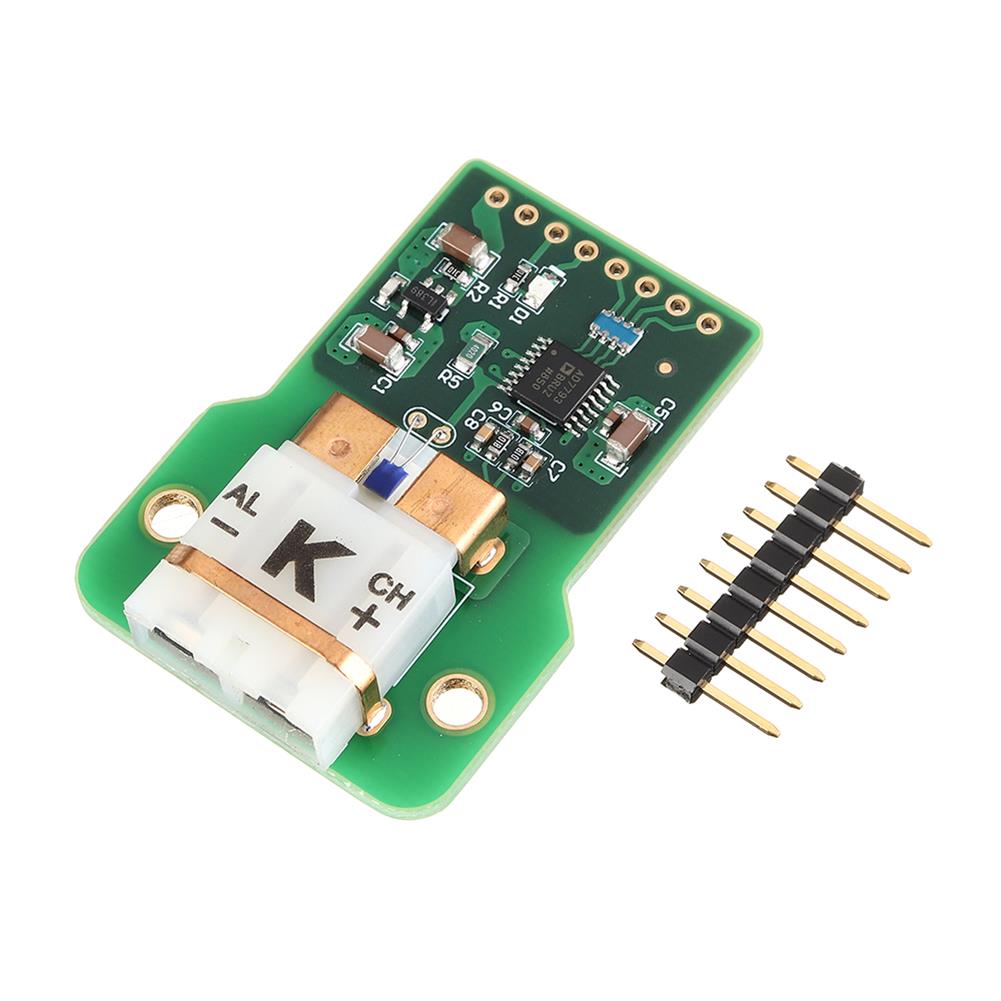 AD7793 High Precision Isolation K Type thermocouple Temperature Sensor Measurement Data Acquisition Module PT100
$50.02
AD7793 High Precision Isolation K Type thermocouple Temperature Sensor Measurement Data Acquisition Module PT100
$50.02
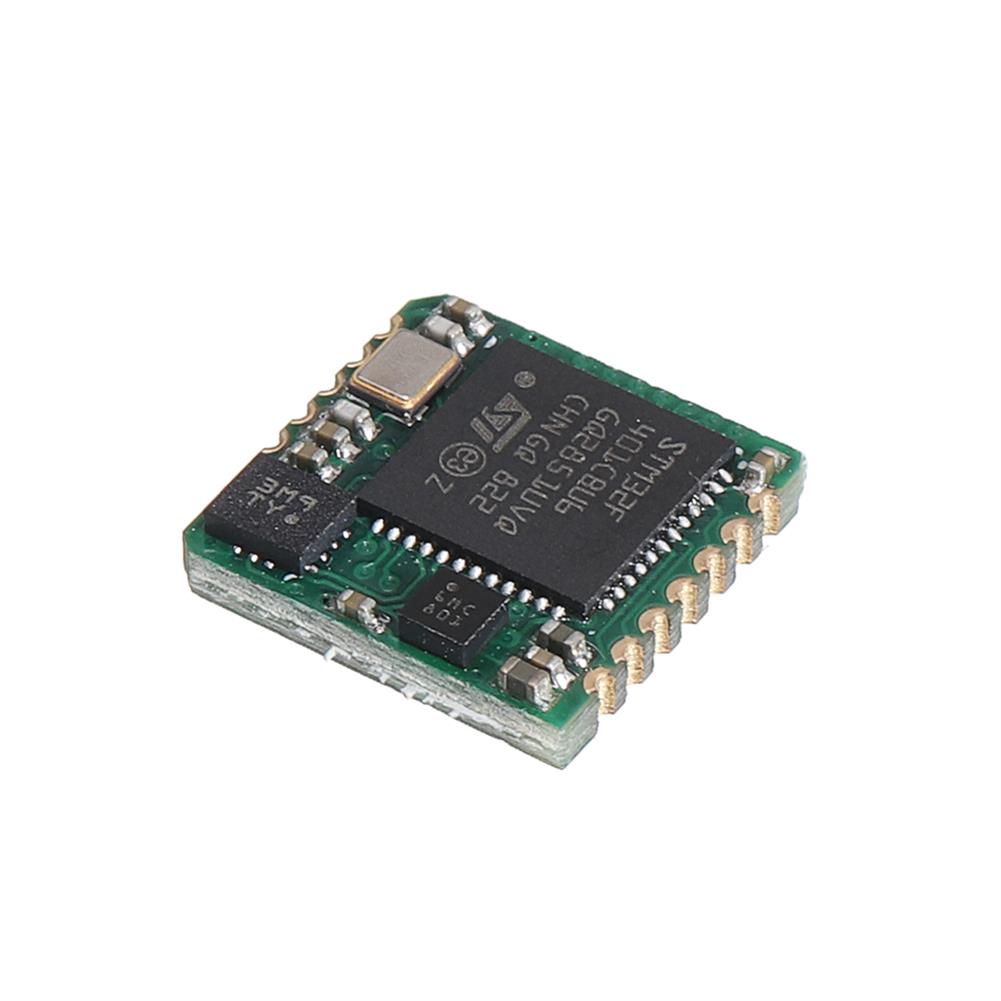
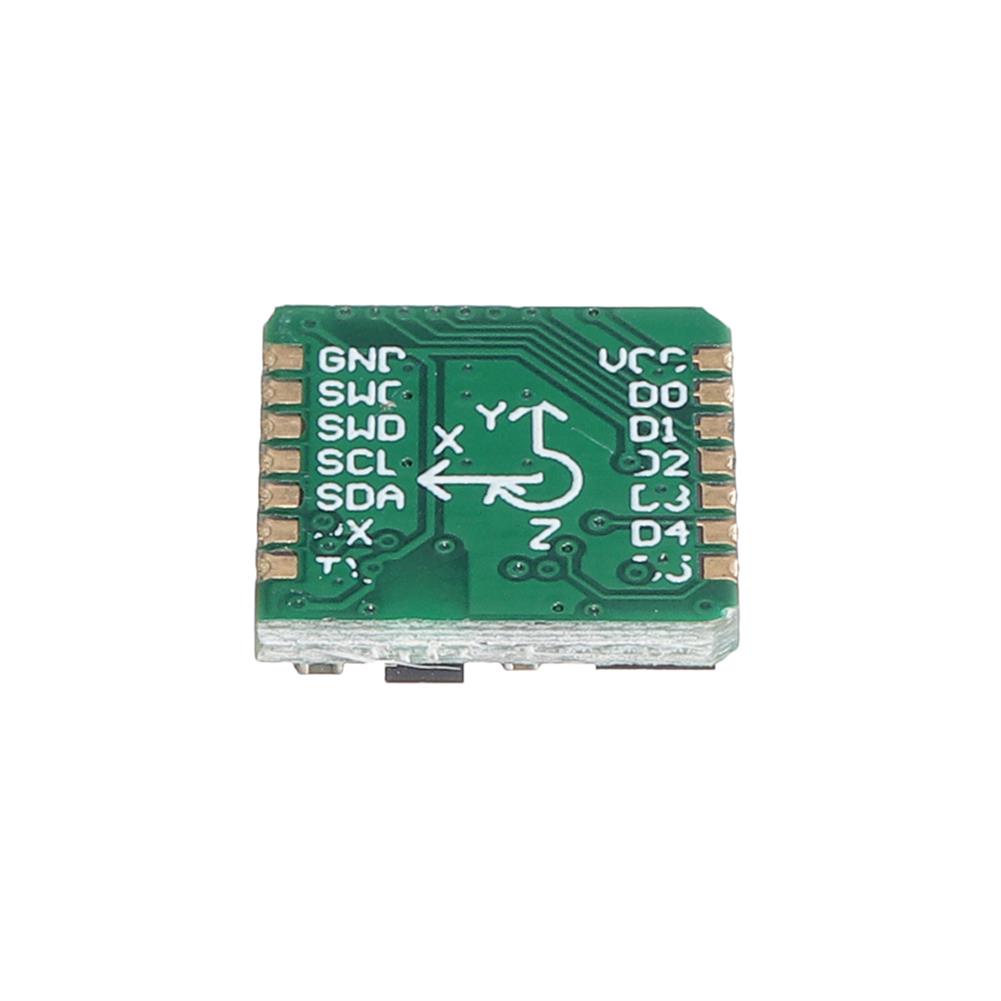
WT931 500Hz AHRS IMU Sensor 3 Axis Angle + Accelerometer + Gyroscope + Magnetometer MPU-9250 Module Geekcreit for Arduino – products that work with official Arduino boards
$78.07
>>>Manual:Click here to open
Features
– Module integrates high-precision gyroscopes, accelerometer, geomagnetic sensor, high-performance microprocessors and advanced dynamics solves dynamic Kalman filter algorithm to quickly solve the current real-time movement of the module attitude .
– The use of advanced digital filtering technology, can effectively reduce the measurement noise and improve measurement accuracy. – Integrates gesture solver, with dynamic Kalman filter algorithm, can get the accurate attitude in dynamic environment, attitude measurement precision is up to 0.05 degrees with high stability, performance is even better than some professional Inclinometer!
– Working voltage is 3.3v ~ 5v.
– Highest 500Hz output data rate. The data rate can be adjusted 0.1 – 500HZ.
– 4 layer PCB technology, thin, smaller, and more reliable. –
Package size is PLCC-28, convenience to embed in PCB board.
Note
So as not to interfere with the magnetometer, do not route under the MPU9250 chip.
Specifications
1. Voltage:3.3V
2. Consumption current
3.Volume:12mm X 12mm X 2mm
4. Pad spacing:Up and down 1.27mm, Left and Right 12mm
5. Measuring dimensions
Acceleration:X Y Z
Angle:X Y Z
Gyro:X Y Z
Magnetic field:X Y Z
6. Range
Acceleration:±2/4/8/ 16g
angular rate:±250/500/1000/2000°/s
Angle:X Z ±180°, Y ±90° 7.
7. Stability:Acceleration:0.01g, Angular speed 0.05° / s.
8. Angle accuracy:X Y dynamic 0.1°static 0.05° Z axis 1°(No magnetic interference and aftercalibration)
9. Data output:Time, Acceleration, Angular rate, Angle,Magnetic field, Quaternion
10.The data output frequency:0.1Hz ~ 500Hz(500Hz default).
11. Data Interface:UART(TTL , Baud rate support2400,4800,9600,19200,38400,57600,115200,230400,460800,921600(default).
Package Included
1 x WT931 500Hz AHRS IMU Sensor
Additional information
| Weight | 0.013 kg |
|---|








Reviews